Патентные исследования гидроусилителя руля
удерживает колеса 2 в положении прямолинейного движения.
При работе гидроцилиндра 1 управляемые колеса 2 поворачиваются, перемещая шток б в соответствующую сторону, что приводит к сжатию пружины 12 посредством движения одного из стаканов 9 и 10 внутрь корпуса 5 при неподвижном другом стакане. Это приводит к созданию стабилизирующего усилия, обеспечивающего возврат колес 2 в положение прямолинейного движения при снятии воздействия на орган рулевого управления.
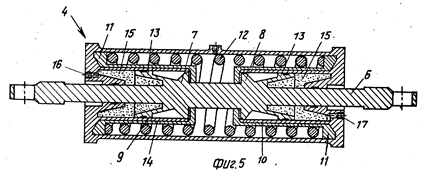
Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осей транспортного средства по второму варианту выполнения (фиг. 5 и 6) содёржит механизм 4 нагружения. выполненный дополнительно с поршнями 13, расположенными на штоке б и установленными для взаимодействия своими наружными поверхностями 14 с корпусом 5 с образованием полостей 15, связанных с управляющим органом отверстиями 16 и 17, причем концы штока б связаны с управляемыми колесами 2. При этом варианте выполнения поршни 13, расположенные на штоке б и связанные через отверстия 16 и 17 с управляющим органом, выполняют функцию исполнительного гидроцилиндра 1 и обеспечивают аналогичную работу устройства.
Формула изобретения.
1. Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осей транспортного средства, имеющего исполнительный гидроцилиндр поворота, механически связанный с управляемыми колесами и гидравлически соединенный с управляющим органом, содержащее механизм нагружения постоянной энергией упругости, отличающееся тем, что, с целью повышения надежности, механизм нагружения выполнен в виде корпуса с размещенным в нем осевым штоком и двумя упорами, двух подвижных в осевом направлении стаканов, размещенных между корпусом и штоком с возможностью взаимодействия каждого из них одной своей торцовой поверхностью с соответствующим упором, а другой посредством выполненного на нем кольцевого выступа с крышкой корпуса, цилиндрической пружиной сжатия, расположенной между кольцевыми выступами, причем по крайней мере один конец осевого штока механически связан с управляемыми колесами.
2. Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осёй транспортного средства, имеющего исполнительный гидроцилиндр поворота, механически связанный с управляемыми колесами и гидравлически соединенный. с управляющим органом, содержащее механизм нагружения постоянной энергией упругости, отличающееся тем, что, с целью повышения надежности, механизм нагружения и исполнительный гидроцилиндр поворота выполнены в виде: единого корпуса с размещенным в нем сквозным штоком с двумя упорами, двух подвижных в осевом направлении стаканов, размещенных между корпусом и штоком с возможностью взаимодействия каждого из них одной своей торцовой поверхностью с соответствующим упором, а другой посредством выполненного на нем кольцевого выступа с крышкой корпуса, цилиндрической пружиной сжатия, расположенной между 15 кольцевыми выступами, а на штоках размещены поршни, установленные для взаимодействия своими наружными поверхностями с корпусом с образованием полостей, связанных с управляющим органом, причем концы сквозного штока механически связаны с управляемыми колесами.
3. Гидроусилитель рулевого управления транспортного средства (патент №610483).
Изобретение относится к гидроусилителям рулевого управления транспортных средств.
Известен гидроусилитель рулевого управления транспортного средства, содержащий силовой цилиндр, встроенный в картер рулевого механизма и кинематически связанный с расположенным в картере рулевого механизма червяком, выполненным за одно целое с рулевым
валом [1].Недостатком этого гидроусилителя рулевого управления является то, что подшипники, в которых установлены червяк и рулевой вал, расположены в различных местах, что приводит к большим продольным габаритам гидроусилителя рулевого управления.
Информация по теме:
Безопасность детей
Сегодня уже нет необходимости ломать голову над подгонкой детского сиденья под оригинальные ремни безопасности. Всё более распространённое приспособление Isofix позволяет присоединить сиденье безопасности для ребёнка прямо к точкам соединения, заранее подготовленными в машине, не используя ремни бе ...
Взаимодействие колёс подвижного состава и рельсового пути
Колеса являются одним из основных и наиболее нагруженных элементов ходовой части железнодорожного подвижного состава, непосредственно взаимодействуя с путем. При проектировании колесных пар следует учитывать ряд конструктивных ограничений, связанных с особенностями их эксплуатации. Колесные пары до ...
Регулятор
Надежную работу и хорошее качество регулирования обеспечивает использование алгоритмов работающих по скольжению колеса. Их суть состоит в формировании сигнала опорной скорости, как бы соответствующей скорости идеально тормозящего колеса (тормозящего с максимальным коэффициентом сцепления). Рисунок ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы