Патентные исследования гидроусилителя руля
Формула изобретения.
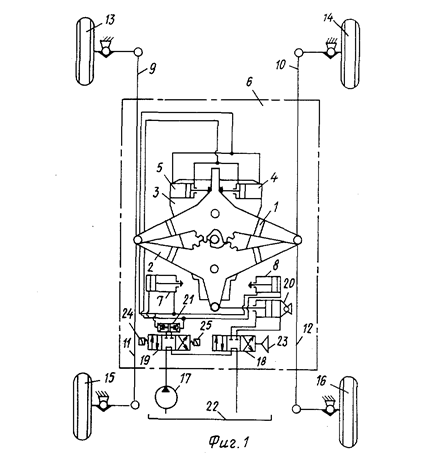
Рулевой привод транспортного средства с двумя управляемыми мостами, содержащий гидрораспределитель рулевого управления, гидравлически соединенный с насосом, 30 гидробаком и гидроцилиндром поворота, кинематически связанным с механизмом поворота и дополнительный гидрораспределитель, гидравлически соединенный с насосом и гидробаком, отличающийся тем, что, с целью повышения его эффективности, механизм по-ворота управляемых колес выполнен в виде двух соединенных между собой зубчатой передачей трехплечих рычагов, каждый из которых шарнирно установлен на качалке, ось которой шарнирно закреплена на корпусе транспортного средства и расположена на середине прямой, соединяющей оси вращения трехплечих рычагов, последние установлены с возможностью их фиксации относительно качалки в нейтральном положении при помощи одной пары гидроцилиндров фиксации, а качалка – с возможностью фиксации относительно корпуса при помощи другой пары гидроцилиндров фиксации, при этом концы трехплечих рычагов шарнирно соединены тягами с управляемыми колесами соответственно переднего и заднего управляемых мостов, а две пары гидроцилиндров фиксации гидравлически соединены между собой и через гидрозамок – с дополнительным гидрораспределителем.
2. Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осей транспортного средства (патент №1351514).
Изобретение относится к транспортному машиностроению. Цель изобретения-повышение надежности устройства. Устройство для стабилизации прямолинейного движения и изменения положения осей транспортного средства на заданных траекториях включает устройство нагружения постоянной энергией упругости, которое прикладывает к оси стабилизирующее усилие большей интенсивности, чем внешние усилия, дёйствующие на нее, смещающий механизм, который прикладывает к оси усилия большей интенсивности, чем указанные стабилизирующие усилия, делая ее тем самым управляемой. Управляющий элемент смещающего механизма приводится в действие при изменении в положении главной системы управления транспортным средством.
Устройство дает возможность оси, с которой оно взаимодействует, находится в неподвижном состоянии и делает ее управляемой тогда, когда главная система рулевого управления подвергается управлению.
Изобретение относится к транспортному машиностроению, а именно к устройствам для стабилизации движения и изменения положения на заданной траектории осей транспортного средства.
Цель изобретения – повышение надежности устройства.
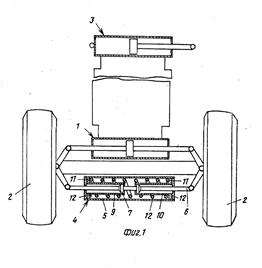
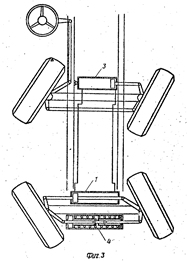
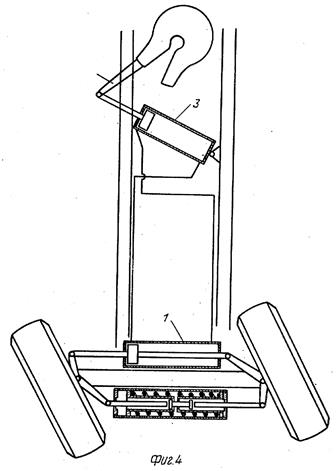
На фиг. 1 показано устройство при управляемой оси, находящейся в прямолинейном положении, первый вариант; на фиг. 2-то же, при управляемой оси, находящейся в положении поворота; на фиг. З-то же, применительно к транспортному средству 15 с передней управляемой осью; на фиг. 4 – то же, применительно к транспортному средству с полуприцепом с управляемым опорным кругом; на фиг, 5 – механизм нагружения устройства при управляемой оси, находящейся в прямолинейном положении, второй вариант; на фиг. б-то же, при управляемой оси, находящейся в положении поворота.
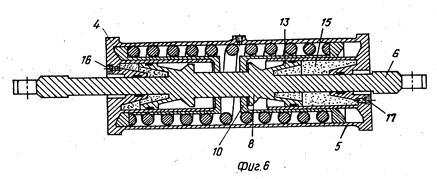
Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осей транспортного средства, имеющего исполнительный гидроцилиндр 1 поворота, механически связанный с управляющими колесами 2 и гидравлически соединенный с управляющим органом 3, содержит механизм 4 нагружения, выполненный по первому варианту в виде корпуса 5 с размещенным в нем осевым штоком б и двумя упорами 7 и 8, двух подвижных в осевом направлении стаканов 9 и 10, размещенных между корпусом 5 и штоком б с возможностью взаимодействия каждого из них одной своей торцовой поверхностью с соответствующим упором (7 или 8), а другой посредством выполненного на нем кольцевого выступа 11 – с крышкой корпуса 5, цилиндрической пружиной 12 сжатия, расположенной между кольцевыми выступами 11, причем по крайней мере один конец штока б связан с управляемыми колесами 2. При отсутствии управляющих усилий со стороны системы управления стабилизирующие усилия, создаваемые нагружающим устройством 4, будут больше внешних усилий, действующих на управляемые колеса 2 и пружина 12
Информация по теме:
Расчет эксплуатационных затрат
Эксплуатационные затраты Эксплуатационные затраты (С) могут складываться из следующих видов затрат: где: - расходы на оплату труда основных производственных рабочих, руб. - расходы на оплату труда вспомогательных рабочих, руб. - затраты на горючесмазочные материалы, руб. - затраты на текущий ремонт ...
Маршруты перевозок грузов из республики Беларусь в Китай
При доставке грузов из Республики Беларусь в Китай используются самые различные маршруты, которые определяются в зависимости от используемого транспорта. Учитывая, что основным способом доставки грузов в китайском направлении и обратно в Республику Беларусь являются контейнерные перевозки, то могут ...
Построение
конечноэлементной модели
После построения геометрической модели, выбора типа элементов (EG), задания свойств материала элементов (MP) и геометрических характеристик (RC) производится разбиение геометрической го объекта (или его части) на конечные элементы, при этом тип элементов должен соответствовать типу геометрического ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы