Охрана труда. Меры безопасности при проведении контроля автосцепного устройства
Выполнение операций контроля автосцепного устройства относятся к категории «очень часто» и обеспечено в пределах зоны легкой досягаемости и оптимальной зоны моторного поля.
Оборудование и организация рабочего места в контрольном пункте автосцепки организовано с учетом антропометрических показателей женщин (т.к. в нашем случае работает женщина - дефектоскопист), также рабочее место и конструкция поворотного стенда для дефектоскопии обеспечивают прямое и свободное положение корпуса тела дефектоскописта и наклон его вперед не более чем на 15°.
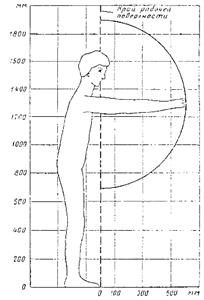
Рисунок 4.2 - Зона досягаемости моторного поля в вертикальной плоскости.
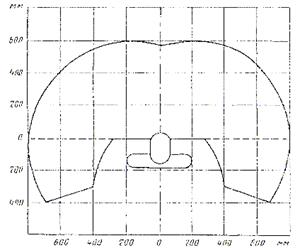
Рисунок 4.3 - Зона досягаемости моторного поля в горизонтальной плоскости
Регулируемые параметры в зависимости от тяжести труда и роста работающего выбирались по номограмме, приведенной на рисунке.
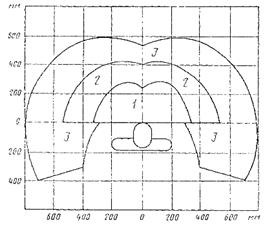
Рисунок 4.4 - Зоны для выполнения ручных операций и размещения органов управления в горизонтальной плоскости: 1 - зона для размещения очень часто используемых и наиболее важных органов управления (оптимальная зона моторного поля); 2 - зона для размещения часто используемых органов управления (зона легкой досягаемости моторного поля); 3 - зона для размещения редко используемых органов управления (зона досягаемости моторного поля)
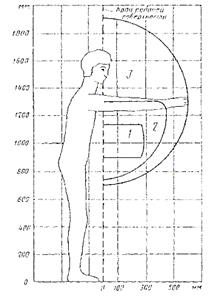
Рисунок 4.5 - Зоны для выполнения ручных операций и размещения органов управления в вертикальной плоскости: 1 - зона для размещения очень часто используемых и наиболее важных органов управления (оптимальная зона моторного поля); 2 - зона для размещения часто используемых органов управления (зона легкой досягаемости моторного поля); 3 - зона для размещения редко используемых органов управления (зона досягаемости моторного поля)
Для обеспечения удобного, возможно близкого подходя к поворотному стенду для дефектоскопирования предусмотрено пространство для стоп размером 150 мм по глубине, 150 мм по высоте и 530 мм по ширине.
Отходы производства в виде отработанных дефектоскопических материалов удаляются в установленные сборники.
Результаты контроля записывают в журнал регистрации результатов неразрушающего контроля корпуса автосцепки.
Рабочие в КПА обеспечены специальной одеждой, отвечающей требованиям ГОСТ 27575-87.
Микроклимат помещения соответствует ГОСТ 12.1.005-88 ССБТ «Воздух рабочей зоны. Общие санитарно-гигиенические требования»:
– температура воздуха в помещении в летнее время не выше +24 ºС, в зимнее время не ниже +12 ºС;
– стены окрашены в светло-зеленый цвет, потолок в белый;
– скорость движения воздушных масс в летнее время на более 0,5 м/с, в зимнее время не более 0,2 м/с;
– относительная влажность не более 70%;
– освещение с КЕО не менее 50%, на рабочих местах не менее 300 лк.
При разборке поглощающего аппарата на стенде возникает опасность заклинивания деталей. Такой аппарат не разбирается. Обстукивание корпуса аппарата с заклинившими деталями производится только без выемки аппарата и передней упорной плиты из тягового хомута.
Для обеспечения пожарной безопасности контрольный пункт автосцепки оборудован пожарной сигнализацией. На видном и легко доступном месте размещены план эвакуации людей и пожарные щиты с набором: ящик с песком – 1 шт.; огнетушитель – 2 шт.; лопата – 2 шт.; лом –1 шт.; топор – 2 шт.; куски плотного волокна, отвечающие требованиям СНиП-II-М2-72, ГОСТ 12.1.010-76 ССБТ «Взрывоопасность. Общие требования» и ГОСТ 12.1.004-91 ССБТ «Пожарная безопасность. Общие требования».
Информация по теме:
Общая характеристика проекта, анализ
потенциальных опасностей и
вредности
Локомотивное депо станции Тихорецкая Северо-Кавказской железной дороги специализируется на выполнении работ по техническому обслуживанию и ремонту тепловозов ЧМЭЗ – Северо-Кавказской железной дороги, текущему ремонту спец тепловозов ЧМЭЗ- совместного приписного парка и других депо Северо-Кавказской ...
Комбинирование ценовых единиц
Ценовая единица – весь маршрут или его часть (блок тарифных компонент), который соответствует определенному типу перевозки, имеет самостоятельную стоимость и может быть оформлен отдельным билетом (на одном или нескольких «связанных» бланках билетов). Если маршрут перевозки: - имеет направление толь ...
Проектирование специального оборудования для ремонта
Описание работы разработанного специального оборудования При ремонте топливного насоса заменяются детали плунжерных пар, имеющие следующие дефекты: скалывание и выкрашивание торцовой и наклон-ной кромок головки плунжера; односторонний и местный натир поверхностей плунжерных пар; деформацию торца пл ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы