Особенности конструкции и условия эксплуатации
Система управления
На самолете установлен электрогидромеханический комплекс систем управления, включающий в себя:
систему управления элеронами;
систему управления рулем направления;
систему управления рулем высоты;
систему управления закрылками;
систему управления предкрылками;
систему управления дефлекторами стабилизатора;.
систему управления интерцепторами;
систему стопорения рулей и элеронов.
На самолете установлена также система автоматического управления САУ-72, с помощью которой можно управлять элеронами, рулем высоты, триммером-сервокомпенсатором руля высоты и рулем направления. Путевой канал САУ-72 используется в качестве демпфера рыскания.
Размещение поверхностей управления показано на рис. 1.
Система управления элеронами обеспечивает поперечное управление самолетом при помощи двух элеронов. Каждый элерон (левый и правый) состоит из двух секций: внутренней и внешней. На внутренней секции левого и правого элеронов установлен кинематический сервокомпенсатор. Управление элеронами производится штурвалами с помощью механической проводки одновременно двумя летчиками или раздельно левым и правым летчиком.
Управление триммером, установленным на внутренней секции левого элерона - электродистанционное.
Система управления рулем направления обеспечивает путевое управление самолетом при помощи двухзвенного руля направления, второе звено которого состоит из двух частей - верхней и нижней. Верхняя часть второго звена кинематически связана с первым звеном. Управление рулем направления производится педалями с помощью механической проводки одновременно двумя летчиками или раздельно левым или правым летчиком.
В проводку управления первого звена подсоединен по необратимой схеме гидроусилитель, работающий от левой или правой гидросистемы. Угол отклонения первого звена ограничен на всех этапах полета, кроме взлета и посадки. Ограничение угла отклонения вводится или снимается автоматически или вручную переключателем.
Управление триммером, установленным на нижней части второго звена, - электродистанционное .
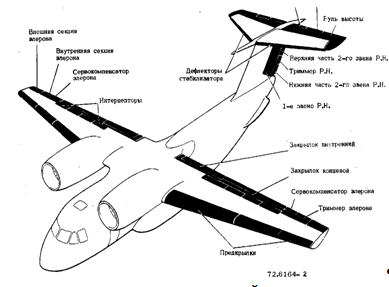
Рис. I. Размещение поверхностей управления
Система управления рулем высоты обеспечивает продольное управление самолетом при помощи руля высоты, состоящего из двух половин - левой и правой. На каждой половине руля высоты установлены кинематический сервокомпенсатор и триммер-сервокомпенсатор. Управление рулем высоты производится штурвальными колонками с помощью механической проводки одновременно двумя летчиками или раздельно левым или правым летчиком. В проводку управления левой и правой половинами руля высоты подсоединены по обратимой схеме два гидроусилителя, работающих от левой или правой гидросистемы.
Управление триммером-сервокомпенсатором - электродистанционное, осуществляется в двух режимах - автоматическом и ручном.
Предусмотрено принудительное отключение питания гидроусилителей руля высоты (совместно с приводом руля направления) от левой и правой гидросистем.
Система управления закрылками - электродистанционная, обеспечивает управление концевыми и внутренними закрылками в двух режимах - основном и резервном.
В основном режиме управление всеми закрылками совмещенное - (от одного рычага ПРЕДКР ЗАКР.): следящее - для концевых и трехпозиционное - для внутренних закрылков.
В резервном режиме управление концевыми и внутренними закрылками раздельное - от переключателей.
Концевые и внутренние закрылки имеют отдельные гидроприводы с трансмиссиями и подъемниками. Гидроприводы питаются рабочей жидкостью от левой и правой гидросистем.
Система обеспечивает защиту от асимметричного выпуска (уборки) закрылков в основном и резервном режимах управления.
Информация по теме:
Система электроснабжения вагона
Освещение вагона Для освещения вагона применяются как лампы накаливания, так и люминесцентные. По сравнению с лампами накаливания применение люминесцентных ламп позволяет обеспечить более высокий уровень освещенности помещений вагона. Вентиляция вагона Вагон имеет приточную принудительную вентиляци ...
Техника безопасности на рабочем месте
Работающие ППВ, ПТО, ПКТО и других предприятий вагонного хозяйства перед допуском к самостоятельной работе в процессе дальнейшей производственной деятельности получают несколько видов инструктажа, проходят стажировку и испытания на право занятия должности. Контроль технического состояния, ремонт и ...
Расчет фонда оплаты труда работников АТП
В курсовом проекте определение фонда оплаты труда работников АТП производится на основе детализации структуры и размера выплат на основе метода прямого расчета заработной платы по категориям работающих: водителям, ремонтно-обслуживающим и подсобно-вспомогательным рабочим, инженерно-техническим рабо ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы