Построение внешней скоростной характеристики двигателя
Для построения внешней скоростной характеристики поршневого двигателя внутреннего сгорания используют эмпирическую формулу, позволяющую по известным координатам одной точки характеристики (Ne max и nN) воспроизвести всю кривую мощности:
 (1)
(1)
где Ne – текущее значение мощности двигателя, соответствующее частоте вращения вала n, в кВт; А1 и А2 – эмпирические коэффициенты, характеризующие тип двигателя. Для карбюраторного двигателя А1 = А2 = 1, для дизельного двигателя А1 = 0,5, А2 = 1,5.
Для выбора текущего значения n диапазон частоты вращения вала двигателя от минимально устойчивых оборотов nmin до nN разбиваем на произвольное число участков (рекомендуется 6-8, целесообразно с постоянным интервалом ![]() кратным 50 или 100 для упрощения расчетов):
кратным 50 или 100 для упрощения расчетов):
Так как у карбюраторного двигателя, не имеющего ограничения частоты вращения, максимальная частота вращения коленчатого вала nmax при движении автомобиля с максимальной скоростью может на 10-20% превышать частоту nN, для него берут еще одно значение n после nN с тем же интервалом ![]()
Минимальную частоту вращения коленчатого вала выбирают в пределах 400…800 об/мин. Меньшие значения принимают для дизелей.
Большее – для карбюраторных двигателей легковых автомобилей и АТС на их базе, среднее – для карбюраторных двигателей грузовых автомобилей и АТС на их базе.
В данном случае примем nmin = 900 об/мин.

Текущее значение крутящего момента а Н м:
 (2)
(2)
Значение мощности и крутящего момента при частоте вращения коленчатого вала n = 900 об/мин:


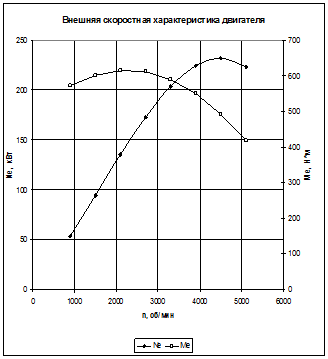
Результаты расчетов значений мощности и крутящего момента представлены в табл. 3, график внешней скоростной характеристики двигателя представлен на рис. 1.
Информация по теме:
Схема включения термостата В СО рассматриваемых двигателей. Работа
термостата
5 3 4 2 1 4 1 – радиатор. 2. вентилятор. 3 – большой круг движения ОЖ. 4 – малый круг. 5 – термостат. двигатель сгорание карбюратор насос В период пуска двигателя для уменьшения износа необходимо быстрее прогреть его до рабочей температуры и при дальнейшей эксплуатации поддерживать эту температуру. ...
Расчёт
валов на статическую прочность
Расчет валов на статическую прочность проводились на ЭВМ "Расчет валов и опор". Расчеты приведены ниже начиная от входного вала до выходного вала. Ведущий вал Опасное сечение имеет координату 55мм Промежуточный вал Опасное сечение имеет координату 170мм Выходной вал Опасное сечение имеет ...
Свариваемость сталей
Свариваемостью называется способность металлов образовывать при установленной технологии сварки сварное соединение, металл шва которого имел бы механические свойства, близкие к основному металлу. При определении понятия свариваемости различают металлургическую и технологическую свариваемость. Метал ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы