Проектирование механического участка
При сдвиге поддона на тележку он подхватывается ленточным транспортером и перемещается до соприкосновения с концевым выключателем привода транспортера. После полной остановки поддона на тележке автоматически включается привод перемещения тележки и она доставляет поддон в заданный адрес. Останавливается тележка концевым выключателем, расположенным на трассе. Затем автоматически включается привод ленточного транспортера тележки, поддон передается на поперечный рольганг, имеющий наклон к станку, и тележка скатывается в пункт загрузки станка.
Возврат поддонов с обработанными деталями и инструментом производится по транспортеру возврата. После возврата поддоны попадаю на ленточный транспортер, который расположен на подъемной платформе, действующей от гидропривода. Платформа поднимает поддон на уровень верхнего яруса, откуда он перемещается по роликовым рольгангам на контроль, перекомплектовку оснастки и переадресовку на следующее рабочее место. Подъемная платформа автоматически опускается для приема следующего поддона. Диспетчерский пункт оборудован устройствами для двухсторонней связи с каждый рабочим местом.
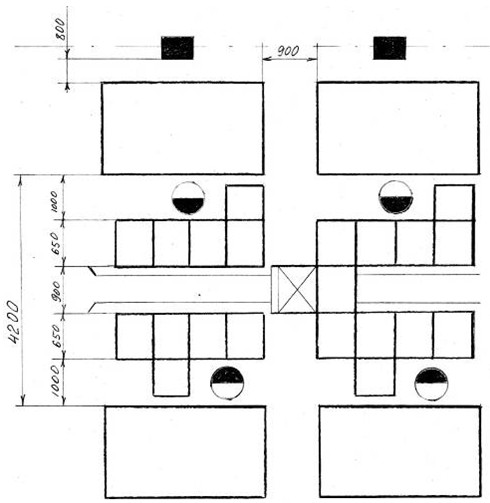
Схема размещения оборудования при перемещении системы ОРГ-2
Информация по теме:
Анализ финансового положения ООО "Русбизнесавто"
Таблица 3.1 Структура имущества организации и источников его формирования Показатель Значение показателя Изменение на начало периода на конец периода (гр.4-гр.2), тыс. руб. (гр.4: гр.2),% в тыс. руб. в% к валюте баланса в тыс. руб. в% к валюте баланса 1 2 3 4 5 6 7 Актив 1. Иммобилизованные средств ...
Правовое регулирование деятельности
транспортно-экспедиторских компаний в России
Международно-правовая регламентация договора транспортной экспедиции пока не создана. Международное частное право не содержит соглашений и конвенций, определяющих основные условия экспедиционного договора. Отдельные попытки унификации условий экспедиционной деятельности предпринимаются со стороны Ф ...
Классификация автосервисов
Существующий отечественный рынок автосервисов можно классифицировать по нескольким критериям. В частности типология российских автомобильных сервисов и станций технического обслуживания (СТО) по величине выглядит следующим образом: Специализированные центры, центры - дилеры. Верхний сегмент рынка ( ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы