Проверка жесткости боковых и хребтовых балок рамы стенда
Исходные данные: номера стержней в месте максимального прогиба и их узлов, а также величина максимального перемещения в пролете взяты из Приложения В и приведены в таблице 16.
Таблица 16 – Исходные данные
|
№ стержня |
№ узла |
Расстояние L, мм |
Перемещение f, мм |
|
Rod57 |
87 |
17100 |
37 |
|
Rod 255 |
86 |
24,2 | |
|
Rod 256 |
85 |
18,6 | |
|
Rod 60 |
84 |
3,71 | |
|
Rod 57 |
87 |
14410 |
27,5 |
|
Rod 255 |
86 |
17,5 | |
|
Rod 256 |
85 |
12,9 | |
|
Rod 60 |
84 |
0,727 | |
|
Rod 57 |
48 |
11720 |
16,5 |
|
Rod 255 |
114 |
9,95 | |
|
Rod 256 |
115 |
6,34 | |
|
Rod 60 |
84 |
1,98 |
Цель расчета: проверка жесткости рамы стенда.
Условие расчета: в APM WinMachine установлено, что на раму стенда воздействуют самые неблагоприятные нагрузки при вывешивании путевой решетки на 20 мм и сдвиг на 150 мм. Усилие вывешивание 150 кН, усилие сдвига 170 кН.
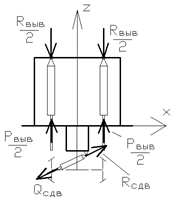
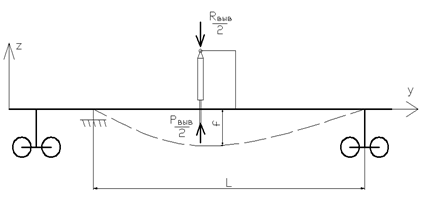
Рисунок 30 – Расчетная схема
Проверка жесткости заключается в сравнении допустимого прогиба с относительным расчетным прогибом.
Условие жесткости:
 , (37)
, (37)
где f – максимальный прогиб, м; L – расстояние между заделками балки, м; ![]() – относительный прогиб;
– относительный прогиб; ![]() – допускаемый прогиб,
– допускаемый прогиб, ![]()
![]() 0,005.
0,005.
Результаты расчетов приведены в таблице 17.
Таблица 17 – Результаты расчетов
|
№ стержня |
Расстояние L, мм |
Перемещение f, мм |
|
|
|
Rod57 |
17100 |
37 |
0,0022 |
0,0022 < 0,002 |
|
Rod 255 |
24,2 |
0,0014 |
0,0014 < 0,002 | |
|
Rod 256 |
18,6 |
0,0011 |
0,0011 < 0,002 | |
|
Rod 60 |
3,71 |
0,0002 |
0,0002 < 0,002 | |
|
Rod 57 |
14410 14410 |
27,5 |
0,0019 |
0,0019 < 0,002 |
|
Rod 255 |
17,5 |
0,0012 |
0,0012 < 0,002 | |
|
Rod 256 |
12,9 |
0,0009 |
0,0009 < 0,002 | |
|
Rod 60 |
0,727 |
0,00005 |
0,00005 < 0,002 | |
|
Rod 57 |
11720 |
16,5 |
0,0014 |
0,0014 < 0,002 |
|
Rod 255 |
9,95 |
0,0008 |
0,0008 < 0,002 | |
|
Rod 256 |
6,34 |
0,0005 |
0,0005 < 0,002 | |
|
Rod 60 |
1,98 |
0,0002 |
0,0002 < 0,002 |
Информация по теме:
Организация работ в дорожно-строительном отряде
Строительные звенья, бригады, ведущие сооружения автомобильной дороги, объединяют в подразделения, которое называют дорожно-строительный отряд (ДСО). При организации работ в ДСО следует рассмотреть следующие задачи: Когда должно приступить к работе звено или бригада, в какие сроки будет выполнена п ...
Организация службы маркетинга на железнодорожном предприятии
Исходя из общих целей деятельности железнодорожного предприятия, целью его отдела маркетинга является выработка рекомендаций по формированию и проведению производственно-сбытовой политики железнодорожного предприятия, а также координация деятельности в этой области всех подразделений предприятия. Е ...
Схема плеч обслуживания эксплуатационного локомотивного депо ТЧ12
В настоящее время эксплуатационное локомотивное депо осуществляет обращение поездов на следующих плечах обслуживания: - СПСМ- БАБАЕВО протяженностью 351км; - СПСМ- СВИРЬ протяженностью 287км; - СПСМ- БОЛОГОЕ протяженностью 319км; - СПСМ- БУДОГОЩЬ протяженностью 133км; - СПСМ-БУСЛОВСКАЯ протяженност ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы