Геометрическая компоновка рабочего оборудования на раме
Основу стенда составляет удлиненная рама грузовой платформы (рисунок 9), состоящая из двух боковых балок и двух хребтовых изготовленных из двутавра № 60 с переменным по высоте сечением.
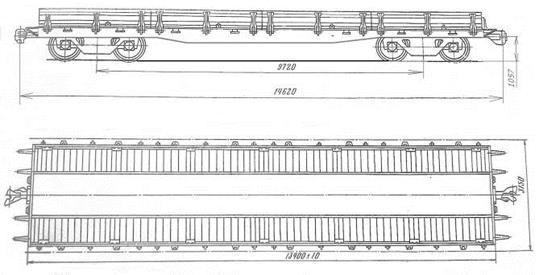
Рисунок 9 – Грузовая платформа
Длина рамы стандартной платформы была увеличена на 10250 мм и составляет 23650 мм, для того чтобы обеспечить базу стенда Lм=19950 мм.
ПРУ взято с выправочно-подбивочной машины ВПР-02 и смонтировано с опорой на раму стенда Кинематическая схема ПРУ представлена на рисунке 5.
Как уже говорилось в аналитическом обзоре, расположение подъемно-рихтовочного устройства в пролете путевых машин зависит от типа машины и ее назначения. У щебнеочистительных и балластировочных машин ПРУ расположено в середине пролета, а у выправочно-подбивочных машин ПРУ находится ближе к задней тележке. Схема компоновки подъемно-рихтовочного устройства на раме стенда изображена на рисунке 10.
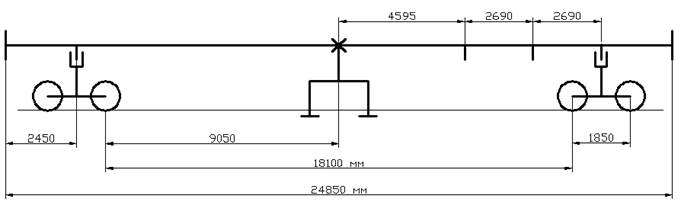
Рисунок 10 – Общая схема компоновки лабораторного стенда
Проектируемый мной в дипломном проекте лабораторный стенд будет иметь переднюю стационарную тележку и заднюю перемещаемою вдоль рамы стенда.
Задняя тележка фиксируется в одном из трех возможных положений, для этого на раме стенда дополнительно находятся еще две шкворневых балки. При максимальной базе платформы Lм = 19950 мм, ось ПРУ находится в середине пролета как у щебнеочистительных и балластировочных машин. При минимальной базе платформы Lм =14570 мм, ось ПРУ расположена на расстоянии 4595 мм, что равнозначно расположению ПРУ у машины ВПР-02.
Информация по теме:
Корректирование нормативной периодичности ТО и до
КР
Для расчёта производственной программы необходимо предварительно для данного АТП выбрать нормативные значения пробегов подвижного состава до КР и периодичности ТО-1 и ТО-2, которые установлены положением для определённых, наиболее типичных условий, а именно: I категории условий эксплуатации, базовы ...
Планировка участка ремонта приборов системы питания
В рамках участка ремонта приборов системы питания осуществляется полное диагностирование системы питания автомобилей с целью выявления неисправностей, а также ремонтные и восстановительные работы по устранению выявленных дефектов и замене износившихся деталей, приборов на новые или ранее восстановл ...
Условия и требования
перевозки сборных ЖБ конструкций
Железобетонные фермы и балки широко применяют при строительстве промышленных зданий и сооружений; их длина достигает 30 м и более. Для перевозки используют автопоезда-балковозы и фермовозы. В качестве тягачей в таких автопоездах используют мощные автомобили-тягачи, которые работают в сцепке с прице ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы