Исследование работы колесной тормозной системы на сухой дороге
Режим торможения на мокрой дороге подразумевает торможения с коэффициентом сцепления в диапазоне 0 – 0.3. Это обеспечивается за счет установки соответствующего диапазона выходных величин на выходе той же схемы формирования реализуемого коэффициента сцепления.
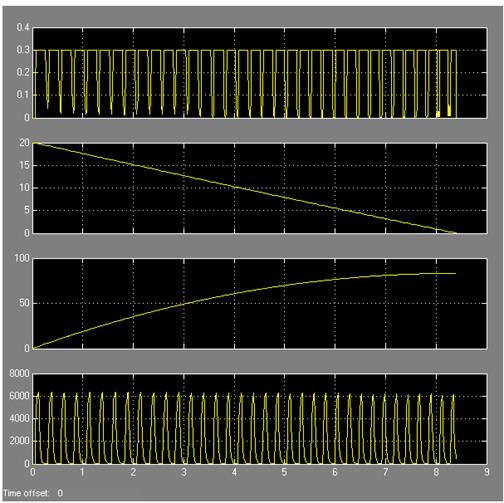
Рисунок 16. Испытания на мокрой дороге. Уставка по скольжению 0.3
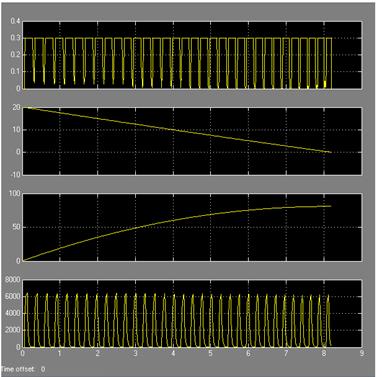
Рисунок 17. Испытания на мокрой дороге. Уставка по скольжению 0.4
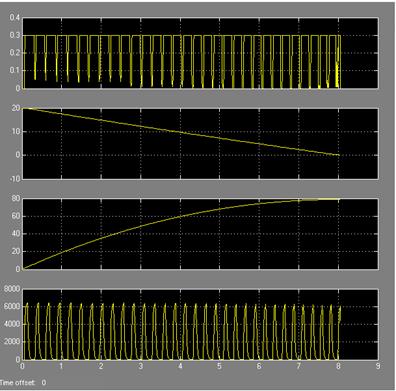
Рисунок 18. Испытания на мокрой дороге. Уставка по скольжению 0.5
По материалам приведенных осциллограмм составлена таблица, приведенная ниже
|
Состояние дороги |
Уставка по скольжению |
Тормозной путь, м |
примечание |
|
сухо |
0,3 |
58 |
32,5 |
|
0,4 |
55 |
31,5 | |
|
0,5 |
50 |
25,5 | |
|
мокро |
0,3 |
85 |
34 |
|
0,4 |
82 |
33 | |
|
0,5 |
80 |
32 |
Анализ таблицы позволяет сделать следующие выводы
– наименьший тормозной путь соответствует настройке регулятора на уставку 0.5
– наименьшее число срабатываний антиюзового автомата соответствует настройке регулятора на уставку по скольжению 0.5
Вывод: в качестве оптимальной считать уставку по скольжению 0.5, тем более, что дальнейшее ее увеличение чревато возникновением продолжительных опасных с точки зрения потери управляемости юзовых режимов колеса.
Информация по теме:
Детали рулевого привода
Рулевой привод служит для передачи усилия от рулевого механизма к колесам. К деталям рулевого привода с установкой колес на общей оси относятся (см. рис. 3): рулевая сошка 5, продольная тяга 6, рычаг 7 продольной тяги, рулевые рычаги 5 поворотных кулаков 11 и поперечная тяга 9. Рулевая сошка одним ...
Основные задачи стоящие перед эксплуатационным локомотивным депо и
возможные способы их решения
Основными задачами депо является: - обеспечение технически исправного состояния локомотивного парка и устойчивой работы локомотивов в эксплуатации; - содержание в работе заданного количества локомотивов в соответствии с объемом работы и выполнение установленных норм простоя локомотивов на техническ ...
Работа автосцепки СА-3
При сцепленном положении в зеве каждой автосцепки размещаются выходящая из ее полости часть замка, а также малый зуб и часть замка соседней автосцепки. Вагоны могут расцепиться, если произойдет значительный вертикальный толчок, в результате которого одна из автосцепок "выскользнет" из дру ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы