Имитационная модель системы управления тормозами
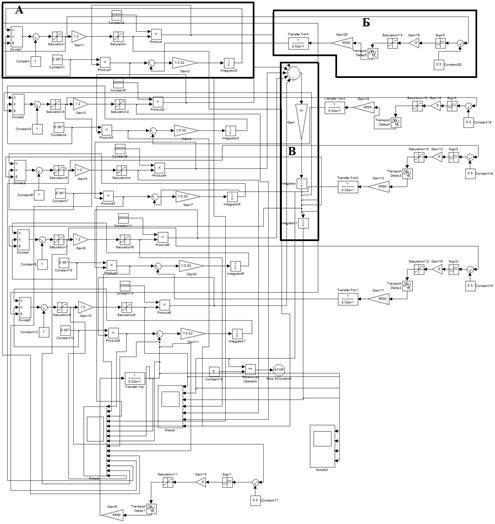
Рисунок 12. Имитационная модель системы управления тормозами
На данном рисунке приняты следующие обозначения:
А-Блок, моделирующий тормозное колесо 1;
Б - Блок, моделирующий регулятор и исполнительный механизм; BBus. Заказ и аренда микроавтобуса для любого мероприятия недорого. Обращайтесь.
В-Блок, моделирующий кабину и прицеп;
Информация по теме:
Техническое обслуживание автосцепочного устройства
Составные части и детали автосцепного устройства делятся на съемные и несъемные. К съемным относятся: корпус автосцепки, клин тягового хомута, поддерживающая планка, тяговый хомут, поглощающий аппарат, упорная плита, детали центрирующего прибора, которые проверяют и ремонтируют в отделении по ремон ...
Ассортимент моторных масел
Масла групп А и Б2 Масла групп А и Б2 предназначены для дизелей старых моделей, работающих на топливах с небольшим содержанием серы. Спрос на масла этих групп сохраняется в большинстве случаев в силу традиции и невысокой цены. За редкими исключениями масла групп А и Б2 могут быть заменены более эфф ...
Специальный раздел: АПК ДК
В системе передача информации с сигнальных точек и переездов осуществляется с помощью приборов АКСТ-СЧМ (автомат контроля сигнальной точки, синтезирующий частоту, микроэлектронный) по проводам линии двойного снижения напряжения ДСН, ОДСН или выделенной физической паре. В системе АПКДК в аппаратуру ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы