Выбор способа обслуживания поездов
Движение пригородных поездов организовывается по зонной системе с учётом пассажиропотока, который меняется по времени года, недели, сезона, периода суток, а также с изменением удалённости населённого пункта от города.
Весь участок обслуживания разделён на отдельные тяговые плечи, различной
длины, в зависимости от размера пассажиропотока. На промежуточных станциях, ограничивающих плечо, производится оборот электропоезда. Зонная система обслуживания электропоездов уменьшает число промежуточных остановок и уменьшает время следования в пути для пассажиров этих удалённых зон.
Кроме зонной системы организации работы электропоездов может применяться система с частично маятниковым движением электропоездов. Такой способ применяется на крупных узлах с большими пригородными перевозками и несколькими направлениями, имеющих одну общую большую промежуточную станцию. Такой способ предусматривает переход поезда с одного направления на другой, что уменьшает потребность в электропоездах и снизить эксплуатационные расходы. Однако при введении маятникового способа требуется организация обработки поездов на территории зонных станций, а значит, потребуется дополнительные средства для развития этих станций.
Для курсового проекта я выбираю зонную систему организации работы электропоездов.
Зонная система организации работы электропоездов представлена на рисунке 1.1.
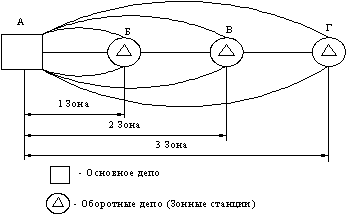
Рисунок 1.1 - Зонная система организации работы электропоездов
Информация по теме:
Система электроснабжения вагона
Освещение вагона Для освещения вагона применяются как лампы накаливания, так и люминесцентные. По сравнению с лампами накаливания применение люминесцентных ламп позволяет обеспечить более высокий уровень освещенности помещений вагона. Вентиляция вагона Вагон имеет приточную принудительную вентиляци ...
Система обозначений и методы моторных испытаний
Классификация моторных масел согласно ГОСТ 17479.1-85 подразделяет их на классы по вязкости и группы по назначению и уровням эксплуатационных свойств. Ниже приведено описание отечественной классификации моторных масел с учетом Изменения №3 к ГОСТ 17479.1-85, которым увеличено число классов вязкости ...
Классификация сцеплений
По виду энергии различают механические, гидравлические и электромагнитные муфты сцепления. Наиболее распространённые механические муфты сцепления подразделяют: По виду трения – на сухие и работающие в масле (мокрые). По режиму включения – постоянно замкнутые и непостоянно замкнутые. По числу ведомы ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы