Анализ конструкций оборудования для вывешивания и сдвига рельсошпальной решетки
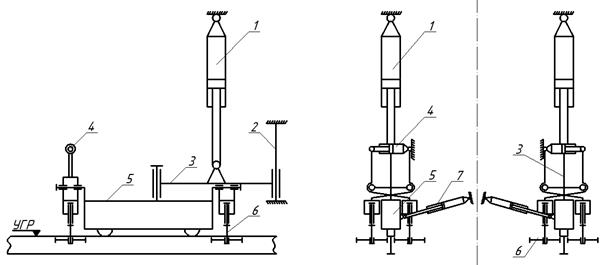
Рисунок 5 – Кинематическая схема ПРУ ВПР-02
1 – гидроцилиндр подъема пути; 2 – вертикальная направляющая; 3 – кронштейн; 4 – гидроцилиндр привода захватов; 5 – балансир; 6 – захватные ролики; 7 – рихтующий гидроцилиндр
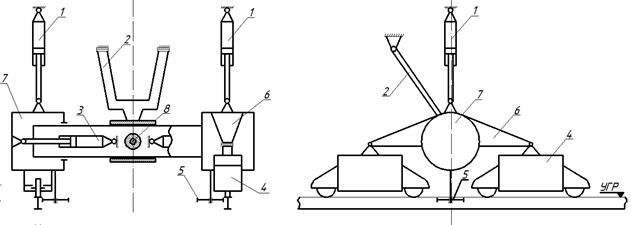
Рисунок 6 – Кинематическая схема ПРУ ВПО-3-3000
1 – гидроцилиндр подъема пути; 2 – реактивный кронштейн; 3 – гидроцилиндр сдвига пути; 4 – электромагнитные роликовые захваты; 5 – рихтующие ролики; 6 – траверса; 7 – центральная балка; 8 - шарнирный узел крепления центральной балки и реактивного кронштейна
Сброс решетки электромагнитным захватом происходит по нескольким причинам. На пути с асбестовым балластом происходит налипание металлических включений к магниту. Электромагнитное поле рассеивается, подъемная сила захвата уменьшается. Необходима очистка пространства в зоне рельса от балласта.
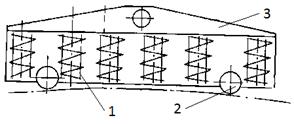
Рисунок 7 – Электромагнитный рельсовый захват
1 – электромагнитная катушка; 2 – опорный ролик; 3 – корпус электромагнита
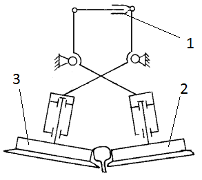
Рисунок 8 – Роликовый рельсовый захват
1 – гидроцилиндр привода захвата; 2 – рихтующий ролик; 3 – захватный ролик
Одной из причин сброса решетки является также неравномерность нагрузок на катушки по длине захвата. При изгибе решетки наибольший ее прогиб смещается в сторону более длинного свободного пролета и практически может находиться вне рельсового захвата. В результате задние катушки нагружаются больше, чем передние и это способствует отрыву от рельса всего магнита. Отрыву захвата способствует также неравномерность зазоров по его длине между нижней пластиной магнита и головкой рельса. По концам захвата они больше, чем в середине. Выравнивание нагрузок на катушки и равномерность зазоров можно обеспечить использованием секционных рельсовых захватов небольшой длины. При односекционном захвате эти недостатки можно устранить применением одноконсольного захвата. Консоль у захвата должна быть только с задней стороны.
Отрыв захвата от рельса происходит также вследствие неудачной конструкции подвески корпуса захвата к поперечной балке. Усилие на перемещение захвата вдоль рельса передается в верхней части его корпуса. При увеличении сопротивления перемещению захвата (особенно на стыках) создается дополнительный момент, разворачивающий магнит в вертикальной плоскости относительно переднего ролика. Это способствует отрыву захвата от рельса. Указанный недостаток можно устранить присоединением подвески к нижней части его корпуса. При такой конструкции существенно уменьшается момент, разворачивающий магнит. С этой же целью можно использовать захват с несимметричным расположением катушек относительно его подвески. Повышает надежность работы электромагнитного захвата также использование дублирующих рельсозахватных роликов.
Роликовые захваты используются в основном на машинах циклического действия. Они приводятся в действие при остановке машины во время рабочего цикла. В настоящее время делается попытка использования этих захватов на машинах непрерывного действия. Однако разработанные конструкции имеют ряд недостатков. В частности, не отработана конструкция, надежно удерживающая решетку в вывешенном состоянии при проходе рельсовых стыков. Не предусмотрены устройства для регулировки зазоров между роликами и рельсами в случае использования машин на путях с различным типом рельсов или при износе роликов. Как и в электромагнитных захватах, наиболее нагруженными являются ролики со стороны меньшего свободного пролета. В конструкции захвата должны быть предусмотрены устройства, выравнивающие нагрузки по его длине на захватных и рихтующих роликах. Нагрузки на один захватный ролик находятся в пределах 25 .30 кН, на рихтующий ролик - 10 .15 кН [10].
Надежность работы роликов зависит от их конструкции и взаимного расположения. Для свободного прохода захватами кривых участков пути и наибольшего вывешивания решетки с меньшим усилием необходимо захватывать рельс на небольшой длине. Однако сближение роликов может привести к тому, что оба комплекта захватных роликов будут находиться на рельсовой накладке. Надежность захвата и удержания решетки при этом резко снижается.
Конструкции захватов должны обеспечивать возможность прохода машиной кривых участков пути и участков с изменением ширины колеи, без заклинивания роликов. Особенно это важно в устройствах с электромеханическим приводом [4].
Следует отметить, что усовершенствование захватов делается с учетом типа машины и условий производства работ. Так, многосекционные захваты целесообразно применять на машинах с большими свободными пролетами (балластировочные и щебнеочистительные машины). На машинах с малой базой захваты должны быть небольшой длины и иметь дублирующие элементы.
Информация по теме:
Составление ведомости оборота электропоездов
Ориентировочный расчёт потребности в парке электропоездов выполняется исходя из величины среднего пассажиропотока и средней населённости поезда. Количество пар пассажирских поездов в пригородном сообщении рассчитываем по формуле: Nэ=, (1.1) Где А - количество пассажиров, перевозимых в сутки, чел; а ...
Эффективность использования трудовых ресурсов и мотивация
Предлагая на рынке транспортные услуги, железнодорожная корпорация может обеспечивать экономическую прибыль лишь за счет непрерывного совершенствования их качества – ускорения, бесперебойности и безопасности транспортного процесса, сокращения сроков доставки и гарантии сохранности грузов, безотказн ...
Комбинирование ценовых единиц
Ценовая единица – весь маршрут или его часть (блок тарифных компонент), который соответствует определенному типу перевозки, имеет самостоятельную стоимость и может быть оформлен отдельным билетом (на одном или нескольких «связанных» бланках билетов). Если маршрут перевозки: - имеет направление толь ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы