Построение геометрической модели
На рисунке 2.1 приведен вид геометрической модели, для данного варианта задания при построении которой в пакете используются общие примитивы, которые представляют собой точку (PT), линию (CR) и поверхность (SF), с которыми связаны и типы конечных элементов, использующиеся при дальнейшем построении конечноэлементной модели.
Построение точек (PT) производится путем ввода их координат с клавиатуры или с использованием мыши: Geometry ® Points ® Define.
Линии (CR) в данной работе строились с использованием имеющихся точек или по координатам Geometry ® Curves ®:
Line with 2 Pts – прямая по двум точкам;
Circular Arc – дуга окружности;
Поверхности (SF) были построены по точкам и линиям:
Geometry ® Surfaces ®:
Define by 3 Pt
Define by 4 Pt
Define by 2 Cr – по двум линиям;
Define by 3 Cr – по трем линиям;
Define by 4 Cr – по четырем линиям.
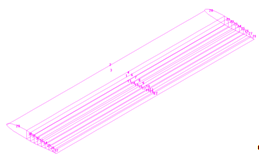
Рис. 2.1 – Геометрическая модель элерона
Информация по теме:
Специализация путей станции
При установлении специализации путей станции руководствуемся схемой станции (Приложение 5), структурой вагонооборота (Приложение 4), организацией и технологией работы. Из путей станции выделяем три пути для приема и отправления передаточных поездов и обгона локомотивов, один путь для накопления отп ...
Диагностика
Причина неисправности Метод устранения Увеличенный рабочий ход педали тормоза 1. Утечка тормозной жидкости из колесных цилиндров 2. Воздух в тормозной системе 3. Повреждены резиновые уплотнительные кольца в главном тормозном цилиндре 4. Повреждены резиновые шланги гидропривода тормозов 5. Повышенно ...
Организация движения в зимних условиях
Наиболее уязвимым элементом ВАДС в этот период является дорога из-за появления снежного покрова и ее обледенения. Проезжая часть дорог, особенно в городах, сужается вследствие образования снежных валов. В зимних условиях в результате названных причин может существенно снизится скорость движения, а ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы