Регулятор
Надежную работу и хорошее качество регулирования обеспечивает использование алгоритмов работающих по скольжению колеса. Их суть состоит в формировании сигнала опорной скорости, как бы соответствующей скорости идеально тормозящего колеса (тормозящего с максимальным коэффициентом сцепления).
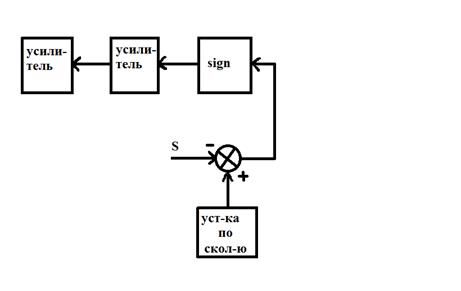
Рисунок 6. Структурная схема регулятора тормозной системы
Наиболее простым является алгоритм САА, основанный на сравнении текущего замедления колеса с некоторой заранее выбранной уставкой. Это обусловлено тем, что при попадании тормозного колеса на правый, неустойчивый склон характеристики сцепления ![]() замедление
замедление ![]() сильно увеличивается. Таким образом, появляется возможность выбрать такое значение замедления, которое свидетельствует о начале блокирования колеса.
сильно увеличивается. Таким образом, появляется возможность выбрать такое значение замедления, которое свидетельствует о начале блокирования колеса.
Принцип управления по замедлению иллюстрируется эпюрами на рисунке 16. При нажатии на тормозную педаль возникает сигнал от задатчика тормозного давления Uл, и тормозное давление Рт начинает расти до максимально возможного. После того, как замедление колеса достигает пороговой величины Е1 – уставки на сброс давленая (обычно|![]() 2|= 0,7g – 1.2g) – в блоке управления формируется сигнал Uy на сброс давления. С некоторой задержкой, обусловленной инерционностью исполнительного устройства, тормозное давление Рт уменьшается, поэтому угловая скорость колеса ωК увеличивается. Когда ускорение колеса станет положительным и равным уставке на увеличение давления
2|= 0,7g – 1.2g) – в блоке управления формируется сигнал Uy на сброс давления. С некоторой задержкой, обусловленной инерционностью исполнительного устройства, тормозное давление Рт уменьшается, поэтому угловая скорость колеса ωК увеличивается. Когда ускорение колеса станет положительным и равным уставке на увеличение давления ![]() 2 (обычно
2 (обычно ![]() 2=0.3g-0.5g,), сигнал Uy на сброс давления становится равным нулю и тормозное давление Рт растет. Такой алгоритм реализован в ряде САА первого поколения.
2=0.3g-0.5g,), сигнал Uy на сброс давления становится равным нулю и тормозное давление Рт растет. Такой алгоритм реализован в ряде САА первого поколения.
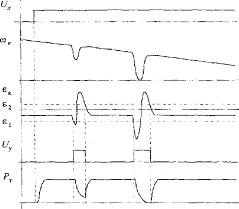
Рисунок 7. Эпюры САА с управлением по замедлению
При работе по трехфазному циклу значение уставкя, определяющей конец фазы сброса, берется близким нулю. Продолжительность фазы выдержки давления соответствует среднему промежутку времени, в течение которого колесо ускоряется.
Закон управления «по замедлению» имеет ряд недостатков, среди которых – слабая помехозащищенность из-за необходимости дифференцирования сигнала угловой скорости тормозного колеса (при использовании ДУС), неэффективность системы при длительных юзах колеса, а также возможность «вялого» закатывания колеса в юз в условиях плохого сцепления колеса с опорной поверхностью.
Для более точного определения момента блокирования колеса в ряде алгоритмов предпринимались попытки коррекции уставки по замедлению в зависимости от текущей скорости самолета. Например, американская фирма «rockland Standart Div» в ряде САА использует две уставки по замедлению [20]. Вторая уставка, меньше первой, используется при уменьшении угловой скорости колеса до некоторого заданного значения. Однако в силу того, что замедление колеса, соответствующее началу блокирования, зависит от множества различных факторов, эти попытки не устраняют основного недостатка – отсутствия адаптации алгоритма управления к условиям торможения.
Аналогичный алгоритм управления может быть реализован и по скольжению колеса. Именно он реализован ниже.
В данном разделе предлагаются имитационные модели в соответствии с математическими моделями, принятыми в разделе 3.
Информация по теме:
Устройство тормозной системы
Источником сжатого воздуха в приводе является компрессор. Компрессор, регулятор давления, предохранитель от замерзания конденсата, конденсационный ресивер составляют питающую часть привода, из которой очищенный сжатый воздух под заданным давлением подается в необходимом количестве в остальные части ...
Расчет режима фрезерования
Для обработки поверхности 6 требуется торцевая насадка фрезы со вставными ножами из твердого сплава, отвечающая (фреза) требованиям – ГОСТ 9473-80. Технические требования – ГОСТ 24360-80. Из ГОСТа определяем основные данные фрезы: D – диаметр фрезы – 250 мм. B – высота фрезы – 45 мм. d – диаметр вн ...
Внешнеторговые отношения между Республикой Беларусь и Китаем
В настоящее время между Республикой Беларусь и Китайской Народной Республикой достигнут высокий уровень сотрудничества. КНР является основным политическим и торгово-экономическим партнером Беларуси в Азии. Дипломатические отношения между Республикой Беларусь и Китайской Народной Республикой установ ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы