Имитационная модель формирования скольжения
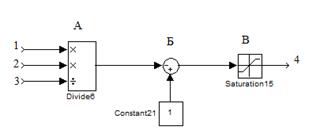
Рисунок 10. Имитационная модель формирования скольжения.
На данном рисунке приняты следующие обозначения:
1-Вход, на который подается угловая скорость тормозного колеса;
2-Вход, на который подается значение радиуса колеса;
3-Вход, на который подается линейная скорость автомобиля;
А-Вычисление вспомогательной величины;
Б - Вычисление величины скольжения;
В-Ограничение величины скольжения;
Имитационная модель регулятора и исполнительного механизма
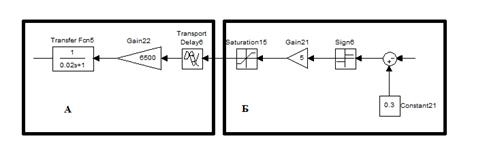
Рисунок 11. Имитационная модель регулятора и исполнительного механизма
На данном рисунке приняты следующие обозначения:
А-Блок, моделирующий исполнительный механизм;
Б-Блок, моделирующий регулятор;
Информация по теме:
Расчет втулочно-роликовой цепи
1) Число зубьев ведущей звездочки z1=29-2*u=29 - 2*1,97=25,06 z1=25 2) Число зубьев ведомой звездочки z2=49 3) Уточненное передаточное число 4) Шаг цепи n3=60 об/мин =31,1 =2,34 5) Определяем скорость цепи 0,77 м/с 6) Находим окружную силу и уточняем давление в шарнирах цепи 4,6кН 41 МПа Полученное ...
Построение графиков силового баланса и динамической характеристики
При построении графиков силового баланса для различных передач и скоростей движения автомобиля рассчитывают значения составляющих уравнения силового баланса: Тяговое усилие на ведущих колесах определяют из выражения, Н: где rд – динамический радиус колеса, который в нормальных условиях движения при ...
Техника безопасности на рабочем месте
Работающие ППВ, ПТО, ПКТО и других предприятий вагонного хозяйства перед допуском к самостоятельной работе в процессе дальнейшей производственной деятельности получают несколько видов инструктажа, проходят стажировку и испытания на право занятия должности. Контроль технического состояния, ремонт и ...
Навигация
- Главная
- Транспортная логистика
- Основные понятия грузоведения
- Строительство автомобильных дорог
- Обслуживание локомотивов
- Автомобильный транспорт
- Моторные масла
- Материалы